STM32 Robot Board Pin Mapping Strategy — Migrating from Teensy
Pin mapping strategy and actual layout results from migrating a robot board from Teensy 4.1 to STM32H743.
Robot Board Pin Mapping Strategy
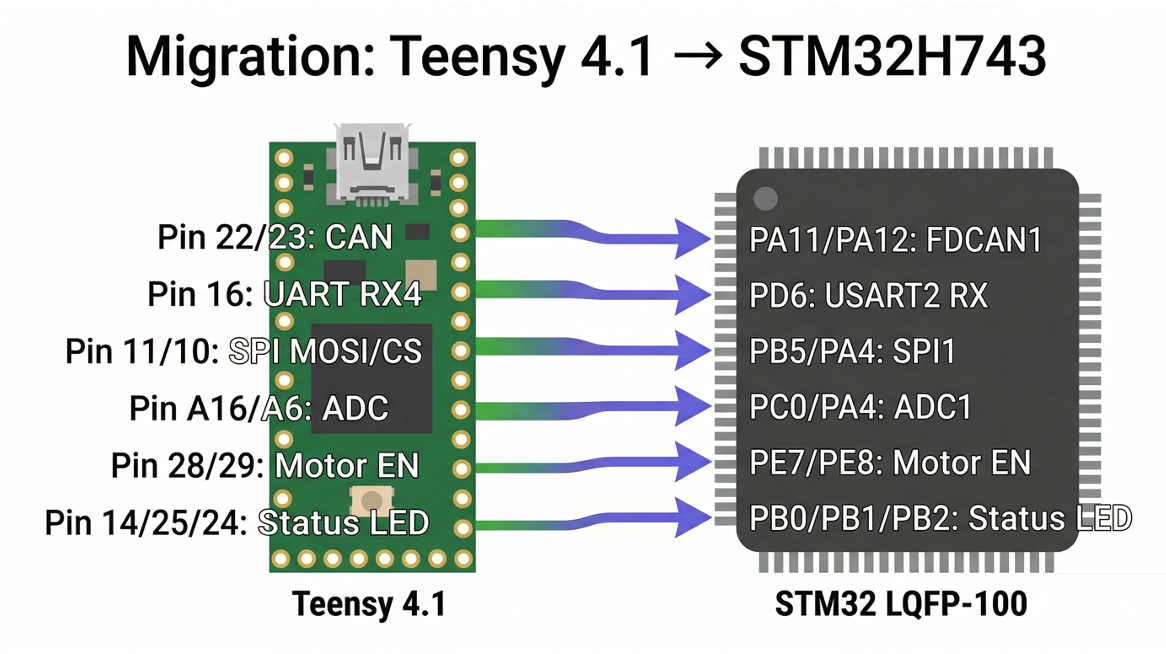 Pin mapping comparison between Teensy 4.1 and STM32H743
Pin mapping comparison between Teensy 4.1 and STM32H743
7.1 Pin Assignment Principles
- Prevent AF conflicts: Only one AF can be used per pin
- Secure power/ground connections: All 18 power pins on LQFP-100 must be properly connected
- Noise isolation: ADC input pins must be physically separated from high-speed digital signals (CAN, SPI)
- Protect debugger pins: PA13 (SWDIO) and PA14 (SWCLK) must never be repurposed
- Handle unused pins: Set to Analog mode (minimizes current draw) or Output Low
- BOOT0 pin: Connect to GND (normal boot = execute from Flash)
7.2 Teensy → STM32 Pin Mapping Table
Final mapping table from the current Board.h Teensy 4.1 pin configuration to STM32H743VITx:
Communication Peripherals
| Function | Teensy Pin | STM32 Pin | AF | Peripheral | Notes |
|---|---|---|---|---|---|
| CAN TX | 22 | PD1 | AF9 | FDCAN1_TX | Motor CAN bus |
| CAN RX | 23 | PD0 | AF9 | FDCAN1_RX | Motor CAN bus |
| IMU UART RX | 16 (RX4) | PD9 | AF7 | USART3_RX | IMU data receive |
| IMU UART TX | N/C | PD8 | AF7 | USART3_TX | (can double as debug) |
| SPI SCK | (implicit) | PA5 | AF5 | SPI1_SCK | Coms MCU communication |
| SPI MOSI | 11 | PB5 | AF5 | SPI1_MOSI | PA7 reserved for ADC |
| SPI MISO | (implicit) | PB4 | AF5 | SPI1_MISO | PA6 reserved for ADC |
| SPI CS | 10 | PA15 | GPIO | — | Software CS |
| SPI IRQ | 34 | PE0 | GPIO | EXTI0 | Interrupt input |
| SPI RST | 4 | PE1 | GPIO | — | Coms MCU reset |
| Serial TX | 1 | PA9 | AF7 | USART1_TX | (debug/PC communication) |
| Serial RX | 0 | PA10 | AF7 | USART1_RX | (debug/PC communication) |
Analog Inputs (ADC)
| Function | Teensy Pin | STM32 Pin | Channel | Peripheral | Notes |
|---|---|---|---|---|---|
| Torque Sensor Left | A16 | PA0 | IN0 | ADC1 | Load cell L |
| Torque Sensor Right | A6 | PA3 | IN3 | ADC1 | Load cell R (PA3 instead of PA6) |
| Angle Sensor Left | A13 | PC3 | IN13 | ADC1 | Left ankle angle |
| Angle Sensor Right | A12 | PC2 | IN12 | ADC1 | Right ankle angle |
| Maxon Current Left | (maxon_current) | PA1 | IN1 | ADC1 | Left motor current |
| Maxon Current Right | (maxon_current) | PA2 | IN2 | ADC1 | Right motor current |
| (Spare 1) | — | PC4 | IN14 | ADC1 | For expansion |
| (Spare 2) | — | PC5 | IN15 | ADC1 | For expansion |
PWM Outputs
| Function | Teensy Pin | STM32 Pin | AF | Peripheral | Notes |
|---|---|---|---|---|---|
| Maxon PWM Left | (maxon_ctrl_L) | PE9 | AF1 | TIM1_CH1 | Left motor |
| Maxon PWM Right | (maxon_ctrl_R) | PE11 | AF1 | TIM1_CH2 | Right motor |
GPIO Outputs
| Function | Teensy Pin | STM32 Pin | Configuration | Notes |
|---|---|---|---|---|
| Status LED Red | 14 | PB0 | Output PP, Low Speed | RGB LED |
| Status LED Green | 25 | PB1 | Output PP, Low Speed | RGB LED |
| Status LED Blue | 24 | PB2 | Output PP, Low Speed | RGB LED |
| Sync LED | 15 | PB10 | Output PP, Low Speed | Sync LED |
| Motor Stop | 9 | PC6 | Output PP, Pull-Down | Emergency stop |
| Motor Enable L0 | 28 | PD3 | Output PP, Pull-Down | Left joint 0 |
| Motor Enable L1 | 29 | PD4 | Output PP, Pull-Down | Left joint 1 |
| Motor Enable R0 | 8 | PD5 | Output PP, Pull-Down | Right joint 0 |
| Motor Enable R1 | 7 | PD6 | Output PP, Pull-Down | Right joint 1 |
| Sync Default | 5 | PC7 | Output PP | Sync default |
| Speed Check | 33 | PC8 | Output PP | Toggle pin for timing measurement |
GPIO Inputs
| Function | Teensy Pin | STM32 Pin | Configuration | Notes |
|---|---|---|---|---|
| Maxon Error Left | (maxon_err_L) | PE2 | Input, Pull-Up | Error detection (active low) |
| Maxon Error Right | (maxon_err_R) | PE3 | Input, Pull-Up | Error detection (active low) |
System Pins (Do Not Change)
| Function | STM32 Pin | Notes |
|---|---|---|
| SWDIO (Debugger) | PA13 | Never reassign |
| SWCLK (Debugger) | PA14 | Never reassign |
| HSE Crystal IN | PH0 (pin 12) | 8MHz crystal |
| HSE Crystal OUT | PH1 (pin 13) | 8MHz crystal |
| NRST | pin 14 (NRST) | Reset button |
| BOOT0 | pin 94 | Connected to GND (Flash boot) |
7.3 AF Conflict Verification
Key conflict resolutions in the above mapping:
| Issue | Cause | Resolution |
|---|---|---|
| PA6 cannot be used for both ADC and SPI1_MISO | AF conflict | Move SPI1_MISO to PB4 (AF5) |
| PA7 cannot be used for both ADC and SPI1_MOSI | AF conflict | Move SPI1_MOSI to PB5 (AF5) |
| PA1 cannot be used for both ADC (current sensing) and UART4_RX | AF conflict | Move IMU UART to USART3 (PD8/PD9) |
| PA6 used for torque sensor R ADC conflicts with SPI | AF conflict | Move torque sensor R to PA3 (ADC1_IN3) |
7.4 Pin Usage Summary
| Port | Used Pins | Unused Pins | Notes |
|---|---|---|---|
| GPIOA | PA0-5, PA9-10, PA13-15 | PA6-8, PA11-12 | PA11/12 reserved for USB |
| GPIOB | PB0-2, PB4-5, PB10 | PB3, PB6-9, PB11-15 | Plenty of room |
| GPIOC | PC2-8 | PC0-1, PC9-13 | PC13 can be WKUP |
| GPIOD | PD0-1, PD3-6, PD8-9 | PD2, PD7, PD10-15 | Plenty of room |
| GPIOE | PE0-3, PE9, PE11 | PE4-8, PE10, PE12-15 | Plenty of room |
Total pins used: ~40 / Spare pins: ~36 — plenty of room for future expansion
7.5 Pin Map Documentation
The finalized pin mapping should be written to Documentation/Hardware/AR_Walker_STM32_Pinmap.md
using the templates/hardware_pinmap_template.md template.
Previous post: STM32CubeMX Practical Configuration | Next post: STM32 Board Bringup

Henry — Robot Education Founder
Engineer dedicated to democratizing robot education for everyone. From hardware bring-up to AI integration, I document real learning.
Comments
Loading comments...