STM32 로봇 보드 핀 매핑 전략 — Teensy에서 STM32로
Teensy 4.1에서 STM32H743으로 마이그레이션하면서 세운 핀 매핑 전략과 실제 배치 결과.
7분 읽기by Henry
stm32pin-mappingrobotics
로봇 보드 핀 매핑 전략
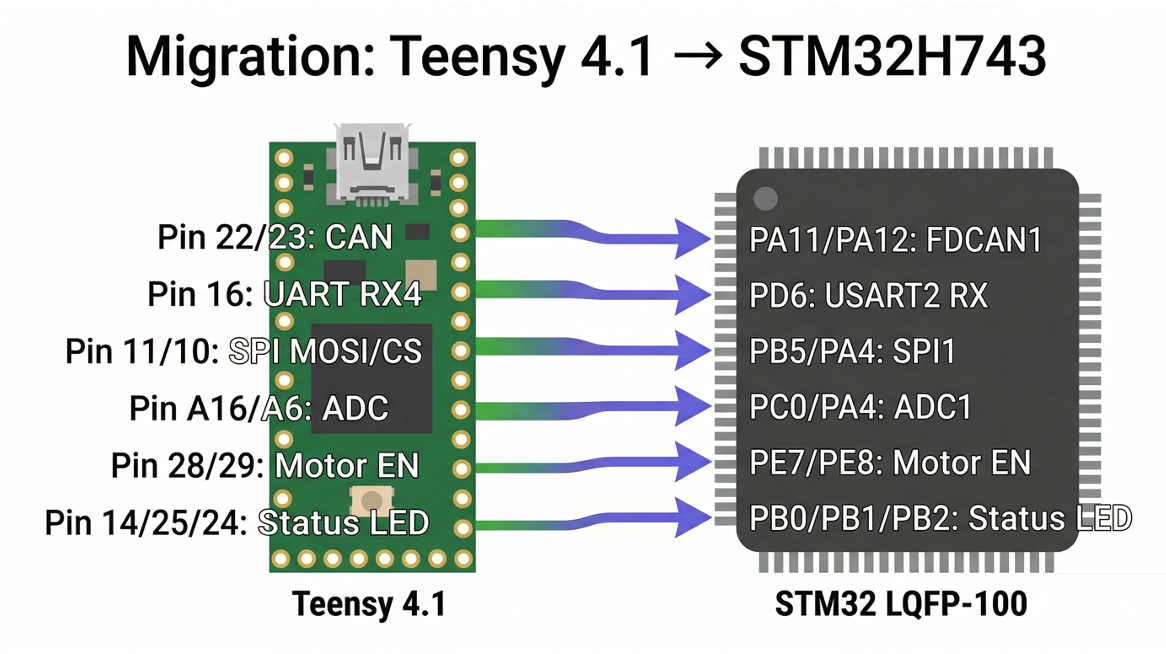 Teensy 4.1에서 STM32H743으로의 핀 매핑 비교도
Teensy 4.1에서 STM32H743으로의 핀 매핑 비교도
7.1 핀 배치 원칙
- AF 충돌 방지: 하나의 핀에는 하나의 AF만 사용 가능
- 전원/그라운드 확보: LQFP-100의 18개 전원 핀 모두 적절히 연결
- 노이즈 분리: ADC 입력 핀은 고속 디지털 신호(CAN, SPI)와 물리적으로 분리
- 디버거 보호: PA13 (SWDIO), PA14 (SWCLK)는 절대 다른 용도로 사용하지 않음
- 미사용 핀 처리: Analog 모드 (소비전류 최소화) 또는 Output Low로 설정
- BOOT0 핀: GND에 연결 (일반 부트 = Flash에서 실행)
7.2 Teensy → STM32 핀 매핑 테이블
현재 Board.h의 Teensy 4.1 핀 설정을 STM32H743VITx로 매핑한 최종 테이블:
통신 페리페럴
| 기능 | Teensy 핀 | STM32 핀 | AF | 페리페럴 | 비고 |
|---|---|---|---|---|---|
| CAN TX | 22 | PD1 | AF9 | FDCAN1_TX | 모터 CAN 버스 |
| CAN RX | 23 | PD0 | AF9 | FDCAN1_RX | 모터 CAN 버스 |
| IMU UART RX | 16 (RX4) | PD9 | AF7 | USART3_RX | IMU 데이터 수신 |
| IMU UART TX | N/C | PD8 | AF7 | USART3_TX | (디버그 겸용 가능) |
| SPI SCK | (implicit) | PA5 | AF5 | SPI1_SCK | Coms MCU 통신 |
| SPI MOSI | 11 | PB5 | AF5 | SPI1_MOSI | PA7은 ADC용으로 보존 |
| SPI MISO | (implicit) | PB4 | AF5 | SPI1_MISO | PA6은 ADC용으로 보존 |
| SPI CS | 10 | PA15 | GPIO | — | 소프트웨어 CS |
| SPI IRQ | 34 | PE0 | GPIO | EXTI0 | 인터럽트 입력 |
| SPI RST | 4 | PE1 | GPIO | — | Coms MCU 리셋 |
| Serial TX | 1 | PA9 | AF7 | USART1_TX | (디버그/PC 통신) |
| Serial RX | 0 | PA10 | AF7 | USART1_RX | (디버그/PC 통신) |
아날로그 입력 (ADC)
| 기능 | Teensy 핀 | STM32 핀 | 채널 | 페리페럴 | 비고 |
|---|---|---|---|---|---|
| 토크센서 Left | A16 | PA0 | IN0 | ADC1 | 로드셀 L |
| 토크센서 Right | A6 | PA3 | IN3 | ADC1 | 로드셀 R (PA6 대신 PA3) |
| 각도센서 Left | A13 | PC3 | IN13 | ADC1 | 좌측 발목 각도 |
| 각도센서 Right | A12 | PC2 | IN12 | ADC1 | 우측 발목 각도 |
| Maxon 전류 Left | (maxon_current) | PA1 | IN1 | ADC1 | 좌측 모터 전류 |
| Maxon 전류 Right | (maxon_current) | PA2 | IN2 | ADC1 | 우측 모터 전류 |
| (예비 1) | — | PC4 | IN14 | ADC1 | 확장용 |
| (예비 2) | — | PC5 | IN15 | ADC1 | 확장용 |
PWM 출력
| 기능 | Teensy 핀 | STM32 핀 | AF | 페리페럴 | 비고 |
|---|---|---|---|---|---|
| Maxon PWM Left | (maxon_ctrl_L) | PE9 | AF1 | TIM1_CH1 | 좌측 모터 |
| Maxon PWM Right | (maxon_ctrl_R) | PE11 | AF1 | TIM1_CH2 | 우측 모터 |
GPIO 출력
| 기능 | Teensy 핀 | STM32 핀 | 설정 | 비고 |
|---|---|---|---|---|
| Status LED Red | 14 | PB0 | Output PP, Low Speed | RGB LED |
| Status LED Green | 25 | PB1 | Output PP, Low Speed | RGB LED |
| Status LED Blue | 24 | PB2 | Output PP, Low Speed | RGB LED |
| Sync LED | 15 | PB10 | Output PP, Low Speed | 동기화 LED |
| Motor Stop | 9 | PC6 | Output PP, Pull-Down | 긴급 정지 |
| Motor Enable L0 | 28 | PD3 | Output PP, Pull-Down | 좌측 관절 0 |
| Motor Enable L1 | 29 | PD4 | Output PP, Pull-Down | 좌측 관절 1 |
| Motor Enable R0 | 8 | PD5 | Output PP, Pull-Down | 우측 관절 0 |
| Motor Enable R1 | 7 | PD6 | Output PP, Pull-Down | 우측 관절 1 |
| Sync Default | 5 | PC7 | Output PP | 동기화 기본 |
| Speed Check | 33 | PC8 | Output PP | 속도 측정용 토글 핀 |
GPIO 입력
| 기능 | Teensy 핀 | STM32 핀 | 설정 | 비고 |
|---|---|---|---|---|
| Maxon Error Left | (maxon_err_L) | PE2 | Input, Pull-Up | 에러 감지 (액티브 로우) |
| Maxon Error Right | (maxon_err_R) | PE3 | Input, Pull-Up | 에러 감지 (액티브 로우) |
시스템 핀 (변경 불가)
| 기능 | STM32 핀 | 비고 |
|---|---|---|
| SWDIO (디버거) | PA13 | 절대 변경 금지 |
| SWCLK (디버거) | PA14 | 절대 변경 금지 |
| HSE 크리스탈 IN | PH0 (pin 12) | 8MHz 크리스탈 |
| HSE 크리스탈 OUT | PH1 (pin 13) | 8MHz 크리스탈 |
| NRST | pin 14 (NRST) | 리셋 버튼 |
| BOOT0 | pin 94 | GND 연결 (Flash 부트) |
7.3 AF 충돌 검증
위 매핑에서 주요 충돌 해결 사항:
| 문제 | 원인 | 해결 |
|---|---|---|
| PA6을 ADC와 SPI1_MISO에 동시 사용 불가 | AF 충돌 | SPI1_MISO를 PB4 (AF5)로 이동 |
| PA7을 ADC와 SPI1_MOSI에 동시 사용 불가 | AF 충돌 | SPI1_MOSI를 PB5 (AF5)로 이동 |
| PA1을 ADC(전류센싱)와 UART4_RX에 동시 불가 | AF 충돌 | IMU UART를 USART3 (PD8/PD9)로 변경 |
| PA6을 토크센서 R ADC로 사용 시 SPI 불가 | AF 충돌 | 토크센서 R을 PA3 (ADC1_IN3)로 이동 |
7.4 핀 사용 현황 요약
| 포트 | 사용된 핀 | 미사용 핀 | 비고 |
|---|---|---|---|
| GPIOA | PA0-5, PA9-10, PA13-15 | PA6-8, PA11-12 | PA11/12는 USB용으로 예비 |
| GPIOB | PB0-2, PB4-5, PB10 | PB3, PB6-9, PB11-15 | 여유 있음 |
| GPIOC | PC2-8 | PC0-1, PC9-13 | PC13은 WKUP 가능 |
| GPIOD | PD0-1, PD3-6, PD8-9 | PD2, PD7, PD10-15 | 여유 있음 |
| GPIOE | PE0-3, PE9, PE11 | PE4-8, PE10, PE12-15 | 여유 있음 |
총 사용 핀: 약 40개 / 여유 핀: 약 36개 — 향후 확장 충분
7.5 핀맵 문서화
최종 확정된 핀 매핑은 templates/hardware_pinmap_template.md 양식에 맞춰
Documentation/Hardware/AR_Walker_STM32_Pinmap.md로 작성한다.

Henry — 로봇 교육 창시자
모두를 위한 로봇 교육을 꿈꾸는 엔지니어입니다. 하드웨어 브링업부터 AI 지능형 로봇까지, 실제 학습 과정을 기록하고 공유합니다.
기술 여정 함께하기
Comments
Loading comments...