STM32 핵심 페리페럴 — FDCAN, UART, SPI, ADC, PWM 총정리
로봇 보드에 필요한 STM32 페리페럴: FDCAN, UART, SPI, I2C, ADC, PWM 타이머를 HAL 코드와 함께 정리.
로봇에 필요한 핵심 페리페럴
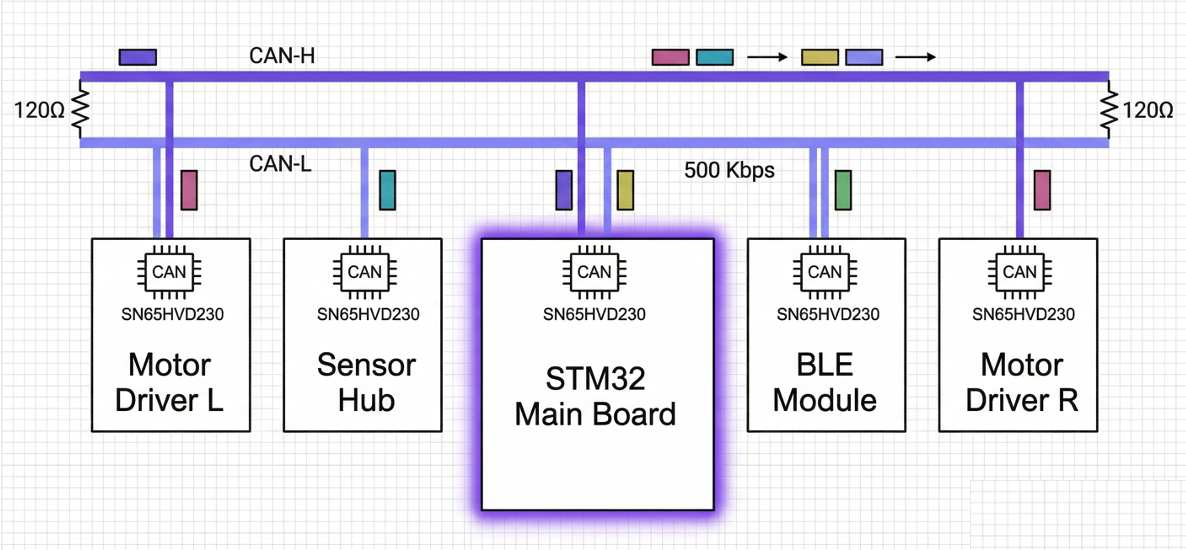 CAN 버스 통신 구조
CAN 버스 통신 구조
5.1 FDCAN (모터 CAN 통신)
AR_Walker의 T-Motor (AK60, AK70, AK80) 모터들은 CAN 버스로 통신한다. STM32H7은 FDCAN (Flexible Data-rate CAN)을 지원하여 기존 CAN 2.0과 CAN FD 모두 사용 가능.
CAN vs CAN FD 비교
| 항목 | CAN 2.0 | CAN FD |
|---|---|---|
| 데이터 길이 | 최대 8 바이트 | 최대 64 바이트 |
| 비트레이트 | 최대 1 Mbps | Nominal 1M + Data 최대 8 Mbps |
| 현재 모터 사용 | CAN 2.0 | (향후 확장 가능) |
AR_Walker의 T-Motor는 CAN 2.0 (1Mbps, 8바이트)을 사용한다. FDCAN 페리페럴은 하위 호환성이 있어 CAN 2.0 모드로 동작 가능.
FDCAN 핀 옵션 (LQFP-100)
| 페리페럴 | TX 핀 옵션 | RX 핀 옵션 | AF |
|---|---|---|---|
| FDCAN1 | PD1, PA12, PB9 | PD0, PA11, PB8 | AF9 |
| FDCAN2 | PB13, PB6 | PB5, PB12 | AF9 |
AR_Walker 권장 매핑:
- FDCAN1: PD1 (TX), PD0 (RX) → AF9
- 이유: Port D에 배치하면 Port A의 ADC/SPI 핀과 충돌 없음
CubeMX 설정
- Connectivity → FDCAN1 활성화
- Parameter Settings:
- Frame Format: Classic (CAN 2.0 모드)
- Mode: Normal (루프백은 테스트용)
- Nominal Prescaler: 3
- Nominal Time Seg1: 13
- Nominal Time Seg2: 2
- Nominal Sync Jump Width: 1
- → Nominal Bit Rate = APB1_CLK / (Prescaler * (1 + Seg1 + Seg2))
- → 120MHz / (3 * (1+13+2)) = 120/48 = 2.5Mbps... → 조정 필요
- Prescaler: 10, Seg1: 5, Seg2: 6 → 120/(10*(1+5+6)) = 1 Mbps
HAL 코드 예제
/* FDCAN 초기화 — CubeMX가 자동 생성 */
FDCAN_HandleTypeDef hfdcan1;
/* USER CODE BEGIN: 필터 설정 + 시작 */
void FDCAN1_Start(void)
{
FDCAN_FilterTypeDef filter;
filter.IdType = FDCAN_STANDARD_ID;
filter.FilterIndex = 0;
filter.FilterType = FDCAN_FILTER_MASK;
filter.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
filter.FilterID1 = 0x000; // 모든 ID 수신
filter.FilterID2 = 0x000; // 마스크: 모든 비트 무시 (= 전부 수신)
HAL_FDCAN_ConfigFilter(&hfdcan1, &filter);
// FIFO0 수신 인터럽트 활성화
HAL_FDCAN_ActivateNotification(&hfdcan1, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, 0);
// CAN 시작
HAL_FDCAN_Start(&hfdcan1);
}
/* CAN 메시지 송신 — 모터 명령 전송 */
void CAN_SendMotorCommand(uint16_t motor_id, float torque)
{
FDCAN_TxHeaderTypeDef tx_header;
uint8_t tx_data[8];
tx_header.Identifier = motor_id; // 예: 0x01 (모터 ID)
tx_header.IdType = FDCAN_STANDARD_ID;
tx_header.TxFrameType = FDCAN_DATA_FRAME;
tx_header.DataLength = FDCAN_DLC_BYTES_8;
tx_header.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
tx_header.BitRateSwitch = FDCAN_BRS_OFF; // CAN 2.0 모드
tx_header.FDFormat = FDCAN_CLASSIC_CAN;
tx_header.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
tx_header.MessageMarker = 0;
// 토크 값을 CAN 데이터로 인코딩 (모터 프로토콜에 따라)
// T-Motor AK 시리즈의 CAN 프로토콜:
// [pos(15:8)] [pos(7:0)] [vel(11:4)] [vel(3:0)|kp(11:8)]
// [kp(7:0)] [kd(11:4)] [kd(3:0)|torque(11:8)] [torque(7:0)]
encode_motor_command(tx_data, 0.0f, 0.0f, 0.0f, 0.0f, torque);
HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &tx_header, tx_data);
}
/* CAN 수신 콜백 — 모터 응답 처리 */
void HAL_FDCAN_RxFifo0Callback(FDCAN_HandleTypeDef *hfdcan, uint32_t RxFifo0ITs)
{
FDCAN_RxHeaderTypeDef rx_header;
uint8_t rx_data[8];
if (HAL_FDCAN_GetRxMessage(hfdcan, FDCAN_RX_FIFO0, &rx_header, rx_data) == HAL_OK)
{
uint16_t motor_id = rx_header.Identifier;
// 모터 응답 파싱: 위치, 속도, 전류
float position, velocity, current;
decode_motor_response(rx_data, &position, &velocity, ¤t);
// ExoData 구조체에 저장
update_motor_data(motor_id, position, velocity, current);
}
}
🔧 하드웨어 참고: CAN 버스에는 CAN 트랜시버 IC (예: MCP2562, SN65HVD230)가 필요하다. MCU의 FDCAN TX/RX 핀 → 트랜시버 → CAN_H/CAN_L 차동 신호 → 모터. 버스 양 끝에 120Ω 종단 저항 필수.
5.2 UART/USART (IMU 통신)
AR_Walker의 IMU는 UART 시리얼 통신으로 데이터를 전송한다. 현재 Teensy에서는 Serial4 (RX4 = pin 16)을 사용.
UART 핀 옵션 (LQFP-100에서 자주 사용)
| 페리페럴 | TX 핀 | RX 핀 | AF | 버스 |
|---|---|---|---|---|
| USART1 | PA9, PB6 | PA10, PB7 | AF7 | APB2 |
| USART2 | PA2, PD5 | PA3, PD6 | AF7 | APB1 |
| USART3 | PB10, PC10, PD8 | PB11, PC11, PD9 | AF7 | APB1 |
| USART6 | PC6 | PC7 | AF7 | APB2 |
| UART4 | PA0, PC10 | PA1, PC11 | AF8 | APB1 |
| UART5 | PC12 | PD2 | AF8/AF14 | APB1 |
| UART7 | PE8 | PE7 | AF7 | APB1 |
| UART8 | PE1 | PE0 | AF8 | APB1 |
AR_Walker IMU 매핑 권장:
- UART4: PA1 (RX) → AF8 (TX 불필요, RX만 사용)
- 또는 USART3: PD9 (RX), PD8 (TX) → AF7
💡 USART vs UART 차이: USART는 동기 모드(클럭 동기화) 지원, UART는 비동기만. IMU 통신은 비동기이므로 어느 것이든 가능.
CubeMX 설정
- Connectivity → UART4 (또는 원하는 UART) 활성화
- Mode: Asynchronous
- Parameter Settings:
- Baud Rate: 115200 (또는 IMU 스펙에 맞춤)
- Word Length: 8 Bits
- Stop Bits: 1
- Parity: None
- Over Sampling: 16
HAL 코드 예제
UART_HandleTypeDef huart4;
/* === DMA를 사용한 효율적 수신 (권장) === */
uint8_t imu_rx_buffer[24]; // IMU 패킷 크기에 맞춤
void IMU_StartReceive(void)
{
// DMA로 순환 수신 시작 — CPU를 블로킹하지 않음
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, imu_rx_buffer, sizeof(imu_rx_buffer));
__HAL_DMA_DISABLE_IT(huart4.hdmarx, DMA_IT_HT); // Half-Transfer 인터럽트 비활성화
}
/* DMA 수신 완료 또는 Idle Line 감지 시 콜백 */
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if (huart == &huart4)
{
// IMU 데이터 파싱
parse_imu_data(imu_rx_buffer, Size);
// 다음 수신 재시작
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, imu_rx_buffer, sizeof(imu_rx_buffer));
__HAL_DMA_DISABLE_IT(huart4.hdmarx, DMA_IT_HT);
}
}
/* === 간단한 폴링 방식 (디버깅용) === */
void IMU_ReadPolling(void)
{
uint8_t byte;
if (HAL_UART_Receive(&huart4, &byte, 1, 1) == HAL_OK)
{
// 바이트 단위 처리
process_imu_byte(byte);
}
}
/* === 디버그 UART 출력 (printf 리다이렉트) === */
// USART3를 디버그용으로 사용하는 경우:
int _write(int file, char *ptr, int len)
{
HAL_UART_Transmit(&huart3, (uint8_t *)ptr, len, HAL_MAX_DELAY);
return len;
}
// 이후 printf("Hello STM32!\n"); 로 시리얼 출력 가능
💡 DMA 수신이 중요한 이유: IMU가 500Hz로 데이터를 보내면, 폴링 방식은 제어 루프(500Hz)와 타이밍이 충돌할 수 있다. DMA를 사용하면 CPU 개입 없이 백그라운드로 수신되므로 제어 루프에 영향을 주지 않는다.
5.3 SPI (MCU 간 통신)
현재 AR_Walker는 Teensy 4.1 (Logic MCU)과 Arduino Nano 33 BLE (Coms MCU) 간 SPI 통신을 사용. STM32로 전환 시에도 SPI 통신 유지.
SPI 핀 옵션
| 페리페럴 | SCK | MOSI | MISO | NSS | AF | 버스 |
|---|---|---|---|---|---|---|
| SPI1 | PA5, PB3 | PA7, PB5 | PA6, PB4 | PA4, PA15 | AF5 | APB2 |
| SPI2 | PB10, PB13 | PB15, PC3 | PB14, PC2 | PB12, PB4 | AF5 | APB1 |
| SPI3 | PB3, PC10 | PB5, PC12 | PB4, PC11 | PA4, PA15 | AF6 | APB1 |
| SPI4 | PE2, PE12 | PE6, PE14 | PE5, PE13 | PE4, PE11 | AF5 | APB2 |
AR_Walker 권장 매핑:
- SPI1 (Master):
- SCK: PA5 (AF5)
- MOSI: PA7 (AF5)
- MISO: PA6 (AF5)
- CS: PA4 (GPIO, 소프트웨어 제어)
- IRQ: PC13 (GPIO 인터럽트 입력)
CubeMX 설정
- Connectivity → SPI1 활성화
- Mode: Full-Duplex Master
- Parameter Settings:
- Data Size: 8 bit
- First Bit: MSB First
- Prescaler: 16 (APB2 120MHz / 16 = 7.5 MHz)
- Clock Polarity (CPOL): Low (모드 0에 맞춤)
- Clock Phase (CPHA): 1 Edge (모드 0) 또는 2 Edge (모드 1)
- NSS: Software (CS를 GPIO로 직접 제어)
CPOL/CPHA 모드: Coms MCU의 SPI 설정 (CPOL/CPHA)에 맞춰야 한다. SPI Mode 0 = CPOL:0 CPHA:0, Mode 1 = CPOL:0 CPHA:1, Mode 2 = CPOL:1 CPHA:0, Mode 3 = CPOL:1 CPHA:1
HAL 코드 예제
SPI_HandleTypeDef hspi1;
/* SPI 송수신 (블로킹) */
void SPI_TransmitReceive(uint8_t *tx_data, uint8_t *rx_data, uint16_t size)
{
// CS LOW (통신 시작)
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1, tx_data, rx_data, size, 100);
// CS HIGH (통신 종료)
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
}
/* SPI DMA 송수신 (비블로킹, 권장) */
void SPI_TransmitReceive_DMA(uint8_t *tx_data, uint8_t *rx_data, uint16_t size)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive_DMA(&hspi1, tx_data, rx_data, size);
}
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
// 수신 데이터 처리
process_coms_mcu_data();
}
}
5.4 ADC (토크 센서, 각도 센서)
AR_Walker의 로드셀(토크 센서)과 각도 센서는 아날로그 전압을 출력한다. STM32H7의 ADC는 최대 16비트 분해능을 지원 (현재 Teensy는 12비트 사용).
ADC 채널과 핀 매핑
| ADC | 채널 | 핀 | 용도 (AR_Walker) |
|---|---|---|---|
| ADC1 | IN0 | PA0 | 토크센서 Left (현재 A16) |
| ADC1 | IN1 | PA1 | Maxon 전류 Left |
| ADC1 | IN2 | PA2 | Maxon 전류 Right |
| ADC1 | IN6 | PA6 | 토크센서 Right (현재 A6) |
| ADC1 | IN12 | PC2 | 각도센서 Right (현재 A12) |
| ADC1 | IN13 | PC3 | 각도센서 Left (현재 A13) |
| ADC1 | IN14 | PC4 | (예비) |
| ADC1 | IN15 | PC5 | (예비) |
⚠️ 주의: PA6를 ADC로 사용하면 SPI1_MISO로는 사용 불가. 이 경우 SPI1_MISO를 PB4로 재배치하거나, 토크센서를 다른 ADC 채널(PC4 등)로 이동해야 한다. → 7장 핀 매핑 전략에서 이 충돌을 해결한다.
CubeMX 설정
- Analog → ADC1 활성화
- IN0, IN6, IN12, IN13 등 필요한 채널 체크
- Parameter Settings:
- Clock Prescaler: Asynchronous clock mode divided by 4
- Resolution: 12 bit (Teensy와 동일) 또는 16 bit (더 정밀)
- Scan Conversion Mode: Enable (여러 채널 순차 변환)
- Continuous Conversion Mode: Enable (계속 변환)
- DMA Continuous Requests: Enable
- Number of Conversions: 4 (사용할 채널 수)
- DMA Settings → ADC1 → DMA Stream 추가 → Circular 모드
HAL 코드 예제
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
// DMA로 수신할 버퍼 (채널 4개 × 값)
// D2 SRAM에 배치해야 DMA가 접근 가능!
__attribute__((section(".RAM_D2")))
volatile uint16_t adc_values[4];
// [0]=토크L, [1]=토크R, [2]=각도R, [3]=각도L
/* ADC + DMA 시작 */
void ADC_Start(void)
{
HAL_ADC_Start_DMA(&hadc1, (uint32_t *)adc_values, 4);
// 이후 adc_values[]는 자동으로 업데이트됨
}
/* ADC 값 읽기 (아무 때나 호출 가능) */
float get_torque_left_voltage(void)
{
// 12비트 ADC: 0~4095 → 0~3.3V
return (float)adc_values[0] * 3.3f / 4096.0f;
}
float get_torque_left_Nm(void)
{
float voltage = get_torque_left_voltage();
// 로드셀 캘리브레이션 적용
// 현재 Config.h: AI_CNT_TO_V = 3.3 / 4096
return (voltage - bias) * sensitivity;
}
/* ADC 변환 완료 콜백 (DMA 사용 시 자동 호출) */
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{
if (hadc == &hadc1)
{
// 새로운 ADC 데이터 준비됨
// DMA Circular 모드이므로 자동으로 다음 변환 시작
}
}
중요: DMA 버퍼 위치 STM32H7에서 DMA1/2는 D2 도메인의 SRAM에만 접근 가능하다. AXI SRAM이나 DTCM에 DMA 버퍼를 배치하면 동작하지 않는다! 링커 스크립트에
.RAM_D2섹션을 추가하고,__attribute__((section(".RAM_D2")))로 배치한다.
5.5 PWM / Timer (모터 제어 신호)
Maxon 모터 드라이버는 PWM 신호로 속도/토크 명령을 받는다.
현재 Teensy에서 analogWrite()로 PWM을 출력하는 것을 STM32 타이머로 구현한다.
타이머 종류
| 분류 | 타이머 | 특징 | PWM 채널 |
|---|---|---|---|
| Advanced | TIM1, TIM8 | 데드타임, 브레이크 기능 | 각 4채널 |
| General Purpose (32bit) | TIM2, TIM5 | 32비트 카운터 | 각 4채널 |
| General Purpose (16bit) | TIM3, TIM4 | 범용 | 각 4채널 |
| General Purpose (1ch) | TIM15, TIM16, TIM17 | 단일 채널 | 각 1~2채널 |
| Basic | TIM6, TIM7 | PWM 불가, 인터럽트/DAC 트리거용 | 없음 |
AR_Walker 권장:
- Maxon PWM Left: TIM1_CH1 → PE9 (AF1)
- Maxon PWM Right: TIM1_CH2 → PE11 (AF1)
- TIM1은 Advanced 타이머로 정밀한 PWM 출력에 적합
CubeMX 설정
- Timers → TIM1 → Channel 1: PWM Generation CH1
- Timers → TIM1 → Channel 2: PWM Generation CH2
- Parameter Settings:
- Prescaler: 239 (타이머 클럭 240MHz / (239+1) = 1 MHz)
- Counter Period (ARR): 999 (1MHz / (999+1) = 1 kHz PWM 주파수)
- Pulse (CCR): 500 (50% 듀티 = 중립값)
- PWM Mode: PWM Mode 1
- CH Polarity: High (Active High)
PWM 주파수 계산:
PWM_freq = Timer_CLK / ((PSC+1) * (ARR+1))= 240MHz / (240 * 1000) = 1 kHz듀티 사이클 계산:
Duty = CCR / (ARR+1) * 100%= 500 / 1000 * 100% = 50%(중립)
HAL 코드 예제
TIM_HandleTypeDef htim1;
/* PWM 시작 */
void Motor_PWM_Start(void)
{
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); // Left motor
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2); // Right motor
}
/* 듀티 사이클 변경 (토크 명령) */
void Motor_SetDuty(uint32_t channel, float duty_percent)
{
// duty_percent: 0.0 ~ 100.0
uint32_t pulse = (uint32_t)(duty_percent / 100.0f * (htim1.Init.Period + 1));
__HAL_TIM_SET_COMPARE(&htim1, channel, pulse);
}
/* Maxon 모터 토크 명령 → PWM 변환 */
void Maxon_SetTorque(float torque_left, float torque_right)
{
// 현재 Board.h의 중립값 기준으로 듀티 계산
// maxon_pwm_neutral_val을 50%로 가정
float duty_left = 50.0f + torque_left * scale_factor;
float duty_right = 50.0f + torque_right * scale_factor;
// 상한/하한 제한 (안전)
duty_left = fminf(fmaxf(duty_left, 10.0f), 90.0f);
duty_right = fminf(fmaxf(duty_right, 10.0f), 90.0f);
Motor_SetDuty(TIM_CHANNEL_1, duty_left);
Motor_SetDuty(TIM_CHANNEL_2, duty_right);
}
/* 모터 정지 (안전 함수) */
void Motor_Stop(void)
{
// 중립값으로 복귀
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500); // 50%
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
// PWM 출력 정지
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_2);
}

Henry — 로봇 교육 창시자
모두를 위한 로봇 교육을 꿈꾸는 엔지니어입니다. 하드웨어 브링업부터 AI 지능형 로봇까지, 실제 학습 과정을 기록하고 공유합니다.
Comments
Loading comments...