STM32CubeMX 실전 설정 — 프로젝트 생성부터 코드 생성까지
STM32CubeMX로 클럭, 핀, 페리페럴을 설정하고 HAL 프로젝트를 생성하는 실전 과정.
7분 읽기by Henry
stm32cubemxhal
STM32CubeMX 실전 설정 과정
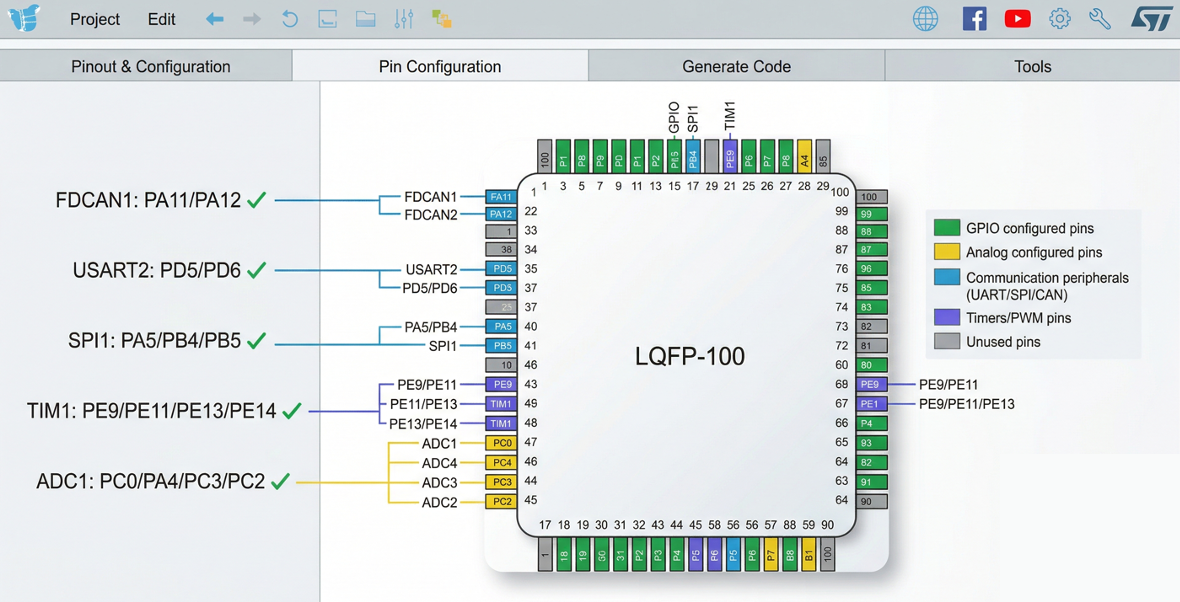 CubeMX 핀 설정 화면
CubeMX 핀 설정 화면
CubeMX는 STM32의 핀 배치, 클럭, 페리페럴을 GUI로 설정하고 초기화 코드를 자동 생성하는 도구이다. STM32CubeIDE에 내장되어 있다.
Step 1: 프로젝트 생성 & 칩 선택
- STM32CubeIDE → File → New → STM32 Project
- MCU/MPU Selector 탭에서 검색:
STM32H743VITx - 칩 선택 후 Next
- Project Name:
AR_Walker_STM32(또는H-Walker_STM32_Test) - Targeted Language: C
- Targeted Binary Type: Executable
- Targeted Project Type: STM32Cube
- Finish →
.ioc파일이 열리며 핀 설정 화면 표시
Step 2: 핀 할당 (Pinout & Configuration)
.ioc 에디터의 칩 그래픽에서 핀을 클릭하여 기능을 할당한다.
설정 순서 (권장):
- 디버그 핀 확보: System Core → SYS → Debug: Serial Wire (PA13/PA14 자동 할당)
- 클럭 소스: System Core → RCC → HSE: Crystal/Ceramic Resonator
- FDCAN1: Connectivity → FDCAN1 → Activated
- TX: PD1, RX: PD0 (자동 또는 수동 선택)
- UART (IMU): Connectivity → UART4 → Mode: Asynchronous
- RX: PA1 (TX 불필요하면 비활성화)
- UART (디버그): Connectivity → USART3 → Mode: Asynchronous
- TX: PD8, RX: PD9
- SPI1: Connectivity → SPI1 → Mode: Full-Duplex Master
- SCK: PA5, MOSI: PB5, MISO: PB4 (PA6/PA7 ADC용으로 남겨두기)
- ADC1: Analog → ADC1 → IN0, IN1, IN2, IN6 (또는 IN14/IN15) 활성화
- PA0, PA1 주의: UART4 RX와 충돌 시 ADC 채널 재배치
- TIM1 PWM: Timers → TIM1 → CH1: PWM Generation, CH2: PWM Generation
- CH1: PE9, CH2: PE11
- GPIO 출력: 각 핀을 클릭 → GPIO_Output 선택
- LED, Motor Enable, Motor Stop 핀들
- GPIO 입력: 모터 에러 핀 등
핀 충돌 확인:
- CubeMX에서 핀이 노란색 = 경고 (대체 가능)
- 빨간색 = 충돌 (해결 필수)
- 좌측 패널에서 "Pinout Conflict" 메시지 확인
Step 3: 클럭 설정 (Clock Configuration)
- 상단 탭에서 Clock Configuration 클릭
- 좌측 Input frequency: 8 (MHz, 사용할 크리스탈에 맞춤)
- PLL Source Mux: HSE 선택
- DIVM1: 1, DIVN1: 120, DIVP1: 2 입력
- System Clock Mux: PLLCLK 선택
- HCLK: 240 MHz 확인 (자동 계산)
- 각 APB 클럭이 120 MHz인지 확인
- 빨간색 경고가 있으면 "Resolve Clock Issues" 버튼 클릭
Step 4: 페리페럴 파라미터 설정
좌측 Configuration 패널에서 각 페리페럴의 상세 설정:
FDCAN1 파라미터
Mode : Normal
Frame Format : Classic (CAN 2.0)
Auto Retransmission : Enable
Nominal Prescaler : 10
Nominal Sync Jump Width : 1
Nominal Time Seg1 : 5
Nominal Time Seg2 : 6
→ Bit Rate = 120MHz / (10 × (1+5+6)) = 1 Mbps
ADC1 파라미터
Clock Prescaler : Asynchronous clock mode divided by 4
Resolution : ADC 12-bit resolution (또는 16-bit)
Scan Conversion Mode : Enable
Continuous Conv Mode : Enable
DMA Continuous Requests : Enable
Number of Conversion : (사용할 채널 수)
DMA 설정
각 페리페럴의 DMA Settings 탭에서:
- ADC1 → DMA Stream 추가 → Mode: Circular
- UART4_RX → DMA Stream 추가 → Mode: Circular
NVIC (인터럽트 우선순위)
인터럽트 우선순위(0=최고) 용도
FDCAN1_IT0 1 CAN 수신 (모터 응답 — 최우선)
TIM6_DAC 2 제어 루프 타이머 (500Hz)
DMA_ADCx 3 ADC 변환 완료
UART4_IRQn 4 IMU 데이터 수신
SPI1_IRQn 5 통신 MCU 데이터
EXTI_IRQn 6 GPIO 인터럽트 (에러 등)
Step 5: 프로젝트 설정
- Project Manager 탭 클릭
- Project Settings:
- Toolchain: STM32CubeIDE
- Generate Under Root: 체크
- Code Generator:
- "Generate peripheral initialization as a pair of '.c/.h' files per peripheral" → 체크 (권장)
- "Keep User Code when re-generating" → 체크 (필수!)
- "Delete previously generated files when not re-generated" → 체크
Step 6: 코드 생성
- Project → Generate Code (또는 Alt+K, Cmd+K)
- 생성되는 파일 구조:
AR_Walker_STM32/
├── Core/
│ ├── Inc/
│ │ ├── main.h ← GPIO 핀 define (CubeMX 자동)
│ │ ├── stm32h7xx_hal_conf.h
│ │ └── stm32h7xx_it.h
│ └── Src/
│ ├── main.c ← ★ 메인 코드 여기에 작성
│ ├── stm32h7xx_hal_msp.c ← 페리페럴 MSP 초기화
│ └── stm32h7xx_it.c ← 인터럽트 핸들러
├── Drivers/
│ ├── CMSIS/ ← ARM 코어 헤더
│ └── STM32H7xx_HAL_Driver/ ← HAL 라이브러리
└── STM32H743VITX_FLASH.ld ← 링커 스크립트
USER CODE 블록 규칙
CubeMX가 코드를 재생성해도 보존되는 영역:
/* USER CODE BEGIN Includes */
#include "motor_control.h" // ✅ 안전!
/* USER CODE END Includes */
// ❌ 여기에 쓰면 재생성 시 삭제됨!
/* USER CODE BEGIN 0 */
void my_init(void) { } // ✅ 안전!
/* USER CODE END 0 */
최선의 방법:
Core/Src/에 별도.c파일을 만들어 유저 코드를 작성한다. 예:motor_control.c,sensor_read.c,can_protocol.c→ CubeMX가 건드리지 않으므로 100% 안전. (자세한 내용은 README.md의 "자동 생성 코드와 유저 코드 관리" 섹션 참고)

Henry — 로봇 교육 창시자
모두를 위한 로봇 교육을 꿈꾸는 엔지니어입니다. 하드웨어 브링업부터 AI 지능형 로봇까지, 실제 학습 과정을 기록하고 공유합니다.
기술 여정 함께하기
Comments
Loading comments...