STM32 보드 브링업 — 처음 전원 넣기부터 동작 확인까지
STM32 커스텀 보드의 첫 전원 투입, LED 점멸, 페리페럴 검증, 통합 테스트까지의 브링업 과정과 HAL 함수 레퍼런스.
14분 읽기by Henry
stm32bringuphaldebugging
보드 브링업
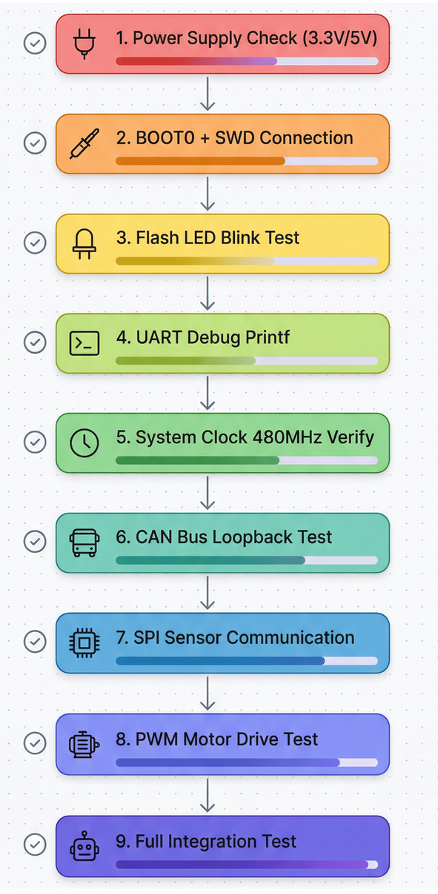 보드 브링업 9단계 플로차트
보드 브링업 9단계 플로차트
보드를 제작한 후, 페리페럴을 하나씩 테스트하며 정상 동작을 확인하는 과정이다. 절대 모든 것을 한 번에 테스트하지 마라 — 문제 발생 시 원인을 찾을 수 없다.
8.1 단계별 테스트 순서
┌─────────────────────────────────────────────────┐
│ Step 1: 전원 확인 │
│ → VDD, VDDA, VCAP 전압 측정 │
│ → 쇼트 없는지 확인 │
├─────────────────────────────────────────────────┤
│ Step 2: 클럭 확인 │
│ → HSE 크리스탈 발진 확인 │
│ → MCO 핀으로 클럭 출력하여 오실로스코프 측정 │
├─────────────────────────────────────────────────┤
│ Step 3: LED 테스트 (GPIO Output) │
│ → LED 깜빡이기 = 전원+클럭+Flash+GPIO 정상 │
├─────────────────────────────────────────────────┤
│ Step 4: UART 테스트 (PC 통신) │
│ → printf 출력 확인 │
│ → 양방향 에코 테스트 │
├─────────────────────────────────────────────────┤
│ Step 5: CAN 테스트 │
│ → 루프백 모드 (자기 자신에게 송수신) │
│ → 외부 CAN 장치 연결 테스트 │
├─────────────────────────────────────────────────┤
│ Step 6: SPI 테스트 │
│ → 로직 분석기로 SCK/MOSI 파형 확인 │
│ → Coms MCU와 데이터 교환 │
├─────────────────────────────────────────────────┤
│ Step 7: ADC 테스트 │
│ → 알려진 전압 (예: 1.65V) 입력 후 읽기 │
│ → 모든 채널 순차 확인 │
├─────────────────────────────────────────────────┤
│ Step 8: PWM 테스트 │
│ → 오실로스코프로 주파수/듀티 확인 │
│ → 모터 드라이버 연결 전 파형만 먼저 확인 │
├─────────────────────────────────────────────────┤
│ Step 9: 통합 테스트 │
│ → 모든 페리페럴 동시 동작 │
│ → 500Hz 제어 루프 타이밍 측정 │
└─────────────────────────────────────────────────┘
8.2 Step 1: 전원 확인
전원 인가 전:
- 멀티미터로 VDD-VSS, VDDA-VSSA 간 저항 측정 → 쇼트 확인
- PCB 납땜 상태 육안 검사 (브릿지, 미납 등)
전원 인가 후:
| 핀 | 기대 전압 | 허용 범위 | 비고 |
|---|---|---|---|
| VDD (여러 핀) | 3.3V | 3.0~3.6V | 디지털 전원 |
| VDDA | 3.3V | 3.0~3.6V | 아날로그 전원 (노이즈 주의) |
| VREF+ | 3.3V | = VDDA | ADC 기준 전압 |
| VCAP1 | ~1.2V | 자동 | 내부 레귤레이터 출력, 1uF 캡 연결 |
VCAP1이 ~1.2V가 아니면 내부 레귤레이터가 동작하지 않는 것 → 코어가 동작 불가. 원인: VCAP 핀에 캐패시터 미연결, 또는 VDD 전원 불량.
8.3 Step 2: 클럭 확인
LED 테스트 전에 클럭이 정상인지 먼저 확인:
/* CubeMX에서 MCO1 출력 활성화: RCC → MCO1 → HSE */
/* PA8 (MCO1 핀)에서 8MHz 클럭 출력 → 오실로스코프로 측정 */
/* 또는 코드에서 직접 설정: */
HAL_RCC_MCOConfig(RCC_MCO1, RCC_MCO1SOURCE_HSE, RCC_MCODIV_1);
// PA8에서 8MHz 사각파가 나오면 HSE 크리스탈 정상!
HAL_RCC_MCOConfig(RCC_MCO1, RCC_MCO1SOURCE_PLL1QCLK, RCC_MCODIV_4);
// PLL1Q / 4 출력 → 240MHz/4 = 60MHz 확인 가능
8.4 Step 3: LED 테스트
4.7절의 LED 깜빡이기 코드 사용.
확인 사항:
- LED가 정확히 500ms 간격으로 깜빡이는가?
- 다른 GPIO 핀의 LED도 동작하는가? (RGB LED 각 색상)
- SWD 디버거로 코드 다운로드 및 디버깅이 되는가?
8.5 Step 4: UART 테스트
/* USER CODE BEGIN 2 */
printf("AR_Walker STM32 Board Test\r\n");
printf("SYSCLK: %lu MHz\r\n", HAL_RCC_GetSysClockFreq() / 1000000);
printf("HCLK: %lu MHz\r\n", HAL_RCC_GetHCLKFreq() / 1000000);
/* USER CODE END 2 */
while (1)
{
/* USER CODE BEGIN 3 */
// 에코 테스트: 수신한 데이터를 그대로 송신
uint8_t rx_byte;
if (HAL_UART_Receive(&huart3, &rx_byte, 1, 10) == HAL_OK)
{
HAL_UART_Transmit(&huart3, &rx_byte, 1, 10);
}
/* USER CODE END 3 */
}
PC에서 확인: 시리얼 터미널 (PuTTY, minicom, Arduino Serial Monitor)로 115200 baud 연결.
8.6 Step 5: CAN 루프백 테스트
/* CubeMX에서 FDCAN1 Mode를 "Internal LoopBack"으로 설정 */
/* → 외부 CAN 트랜시버 없이 자기 자신에게 메시지를 보내 수신 확인 */
void CAN_LoopbackTest(void)
{
FDCAN_TxHeaderTypeDef tx_header;
FDCAN_RxHeaderTypeDef rx_header;
uint8_t tx_data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
uint8_t rx_data[8] = {0};
tx_header.Identifier = 0x123;
tx_header.IdType = FDCAN_STANDARD_ID;
tx_header.TxFrameType = FDCAN_DATA_FRAME;
tx_header.DataLength = FDCAN_DLC_BYTES_8;
tx_header.BitRateSwitch = FDCAN_BRS_OFF;
tx_header.FDFormat = FDCAN_CLASSIC_CAN;
// 메시지 송신
HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &tx_header, tx_data);
HAL_Delay(10);
// 메시지 수신 확인
if (HAL_FDCAN_GetRxMessage(&hfdcan1, FDCAN_RX_FIFO0, &rx_header, rx_data) == HAL_OK)
{
if (rx_header.Identifier == 0x123 && rx_data[0] == 0x01)
{
printf("CAN Loopback Test: PASSED!\r\n");
}
}
else
{
printf("CAN Loopback Test: FAILED!\r\n");
}
}
8.7 Step 6~8: SPI, ADC, PWM 테스트
각각 독립적으로 테스트한다. 순서는 중요하지 않지만, 하나씩 확인한다.
SPI 테스트:
// 루프백: MOSI와 MISO를 점퍼 와이어로 연결
uint8_t tx = 0xA5, rx = 0x00;
HAL_SPI_TransmitReceive(&hspi1, &tx, &rx, 1, 100);
printf("SPI Loopback: TX=0x%02X, RX=0x%02X %s\r\n",
tx, rx, (tx == rx) ? "PASS" : "FAIL");
ADC 테스트:
// PA0에 1.65V (VDD/2) 연결 후:
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, 100);
uint32_t adc_val = HAL_ADC_GetValue(&hadc1);
float voltage = adc_val * 3.3f / 4096.0f;
printf("ADC IN0: %lu (%.3f V, expected ~1.65V)\r\n", adc_val, voltage);
PWM 테스트:
// PE9에서 1kHz, 50% 듀티 PWM 출력
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
// → 오실로스코프로 PE9 핀 측정: 1kHz, 50% 확인
// 듀티 변경 테스트:
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 250); // 25%
HAL_Delay(2000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 750); // 75%
8.8 Step 9: 통합 테스트
모든 개별 테스트 통과 후, 전체를 동시에 구동:
/* 500Hz 제어 루프 (TIM6 인터럽트 사용) */
// CubeMX: TIM6, Prescaler=239, Period=1999 → 240MHz/(240*2000) = 500Hz
// 인터럽트에서 500Hz 카운터 사용
volatile uint8_t control_loop_flag = 0;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == &htim6)
{
control_loop_flag = 1;
}
}
/* main.c while(1) 내부 */
while (1)
{
if (control_loop_flag)
{
control_loop_flag = 0;
// 타이밍 측정 시작
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_SET); // Speed Check 핀
// 1. ADC 읽기 (DMA이므로 즉시 사용 가능)
float torque_L = get_torque_left_Nm();
float torque_R = get_torque_right_Nm();
// 2. IMU 데이터 확인 (DMA 수신 완료된 최신 값)
float gyro_z = get_imu_gyro_z();
// 3. 제어 알고리즘 실행
float cmd_L = controller_update(torque_L, gyro_z);
float cmd_R = controller_update(torque_R, gyro_z);
// 4. 모터 명령 송신 (CAN 또는 PWM)
CAN_SendMotorCommand(0x01, cmd_L);
CAN_SendMotorCommand(0x02, cmd_R);
// 5. SPI로 Coms MCU에 상태 전송
SPI_SendStatus(torque_L, torque_R, cmd_L, cmd_R);
// 타이밍 측정 끝
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
}
}
통합 테스트 확인 사항:
- Speed Check 핀(PC8)의 HIGH 구간이 2ms(= 500Hz 주기) 미만인가? (제어 루프가 시간 내 완료)
- 모든 ADC 채널이 정상 값을 읽는가?
- CAN 송수신이 제어 루프와 동기화되어 동작하는가?
- UART 디버그 출력이 제어 루프에 영향을 주지 않는가?
- SPI 통신이 정상인가?
- 장시간 (수 분~수 시간) 운행해도 안정적인가?
HAL 함수 레퍼런스
| 카테고리 | 함수 | 설명 |
|---|---|---|
| 시스템 | HAL_Init() |
HAL 초기화, SysTick 설정 |
HAL_Delay(ms) |
밀리초 대기 (블로킹) | |
HAL_GetTick() |
시스템 시작 후 밀리초 카운터 | |
| GPIO | HAL_GPIO_Init(port, &init) |
GPIO 초기화 |
HAL_GPIO_WritePin(port, pin, state) |
핀 출력 | |
HAL_GPIO_ReadPin(port, pin) |
핀 읽기 | |
HAL_GPIO_TogglePin(port, pin) |
핀 토글 | |
| UART | HAL_UART_Transmit(&h, data, len, timeout) |
송신 (블로킹) |
HAL_UART_Receive(&h, data, len, timeout) |
수신 (블로킹) | |
HAL_UART_Transmit_DMA(&h, data, len) |
DMA 송신 | |
HAL_UARTEx_ReceiveToIdle_DMA(&h, data, len) |
DMA 수신 (Idle 감지) | |
| SPI | HAL_SPI_TransmitReceive(&h, tx, rx, len, timeout) |
송수신 |
HAL_SPI_TransmitReceive_DMA(&h, tx, rx, len) |
DMA 송수신 | |
| ADC | HAL_ADC_Start(&h) |
ADC 변환 시작 |
HAL_ADC_Start_DMA(&h, data, len) |
DMA ADC 시작 | |
HAL_ADC_GetValue(&h) |
변환 결과 읽기 | |
| CAN | HAL_FDCAN_Start(&h) |
FDCAN 시작 |
HAL_FDCAN_AddMessageToTxFifoQ(&h, &hdr, data) |
메시지 송신 | |
HAL_FDCAN_GetRxMessage(&h, fifo, &hdr, data) |
메시지 수신 | |
HAL_FDCAN_ConfigFilter(&h, &filter) |
수신 필터 설정 | |
| Timer | HAL_TIM_PWM_Start(&h, ch) |
PWM 출력 시작 |
__HAL_TIM_SET_COMPARE(&h, ch, val) |
PWM 듀티 변경 | |
HAL_TIM_Base_Start_IT(&h) |
타이머 인터럽트 시작 | |
| 클럭 | HAL_RCC_GetSysClockFreq() |
SYSCLK 주파수 확인 |
HAL_RCC_GetHCLKFreq() |
AHB 클럭 확인 |
참고 자료
| 자료 | 설명 |
|---|---|
| STM32H743 Datasheet (DS12110) | 핀아웃, AF 테이블, 전기적 특성 |
| STM32H7 Reference Manual (RM0433) | 레지스터, 페리페럴 상세 동작 |
| STM32H7 HAL User Manual (UM2217) | HAL 함수 API 문서 |
| AN5293 | STM32H7 FDCAN 사용 가이드 |
| AN4031 | DMA 컨트롤러 사용 가이드 |
| AR_Walker STM32_Setup/README.md | 멀티 PC 개발 환경, USER CODE 관리 |
| AR_Walker STM32_Setup/project_structure.md | 모노레포 프로젝트 구조 |
| AR_Walker Board.h | 현재 Teensy 핀 설정 (매핑 원본) |
최종 업데이트: 2026-04-06 작성 기준 칩: STM32H743VITx (LQFP-100) 프로젝트: AR_Walker (보행 보조 로봇 외골격)

Henry — 로봇 교육 창시자
모두를 위한 로봇 교육을 꿈꾸는 엔지니어입니다. 하드웨어 브링업부터 AI 지능형 로봇까지, 실제 학습 과정을 기록하고 공유합니다.
기술 여정 함께하기
Comments
Loading comments...