STM32 아키텍처 기초 — Cortex-M7, 메모리, 버스 완전 정리
STM32H743VITx의 ARM Cortex-M7 코어, 메모리 맵, 버스 아키텍처를 상세히 정리한 스터디 노트.
4분 읽기by Henry
stm32arm-cortex-m7embedded
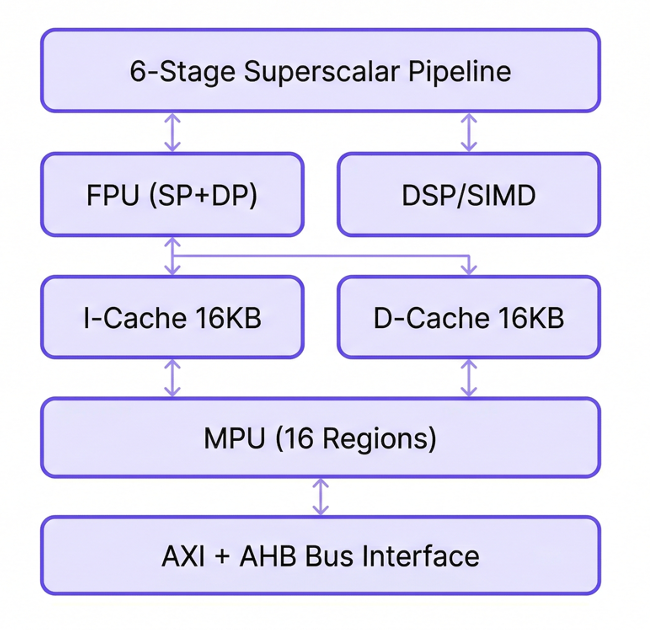 Cortex-M7 코어 블록 다이어그램
Cortex-M7 코어 블록 다이어그램
1.1 ARM Cortex-M7 코어
STM32H743VITx는 ARM Cortex-M7 코어를 탑재한 고성능 마이크로컨트롤러이다.
코어 특성:
| 항목 | 사양 |
|---|---|
| 아키텍처 | ARMv7E-M |
| 파이프라인 | 6단계 슈퍼스칼라 (듀얼 이슈) |
| FPU | 단정밀도(SP) + 배정밀도(DP) 부동소수점 연산 |
| DSP | 단일 사이클 MAC, SIMD 명령어 |
| I-Cache | 16 KB (명령어 캐시) |
| D-Cache | 16 KB (데이터 캐시) |
| MPU | 16 리전 메모리 보호 유닛 |
| 최대 클럭 | 480 MHz |
왜 로봇 보드에 Cortex-M7인가?
- 500Hz 제어 루프를 안정적으로 구동 (현재 Teensy 4.1과 동일 코어)
- FPU로 PID 연산, 토크 계산 등 실수 연산을 하드웨어로 처리
- DSP 명령어로 센서 데이터 필터링 (IMU, 로드셀) 가속
- 캐시로 Flash에서 코드 실행 시에도 고속 동작 보장
1.2 STM32H743VITx 칩 스펙 요약
| 항목 | 사양 | 비고 |
|---|---|---|
| 패키지 | LQFP-100 | 100핀, 14x14mm |
| Flash | 2 MB | 듀얼 뱅크 |
| RAM 총합 | 1 MB | 아래 상세 |
| ITCM | 64 KB | 명령어 전용 (0사이클 대기) |
| DTCM | 128 KB | 가장 빠른 RAM (0사이클 대기) |
| AXI SRAM | 512 KB | 범용 대용량 |
| SRAM1 | 128 KB | D2 도메인 |
| SRAM2 | 128 KB | D2 도메인 |
| SRAM3 | 32 KB | D2 도메인 |
| SRAM4 | 64 KB | D3 도메인 |
| Backup SRAM | 4 KB | 배터리 백업 |
| GPIO | 최대 82개 | LQFP-100에서 사용 가능 |
| ADC | 3개 (ADC1/2/3) | 16비트, 3.6 MSPS |
| FDCAN | 2개 | CAN FD 지원 |
| UART/USART | 8개 | USART1-3,6 + UART4,5,7,8 |
| SPI | 6개 | SPI1-6 |
| I2C | 4개 | I2C1-4 |
| Timer | 다수 | TIM1-17 (Advanced, GP, Basic) |
| 동작 전압 | 1.62V ~ 3.6V | 일반적으로 3.3V 사용 |
1.3 메모리 맵
STM32H7은 전원 도메인(Power Domain)별로 메모리와 페리페럴이 구분된다.
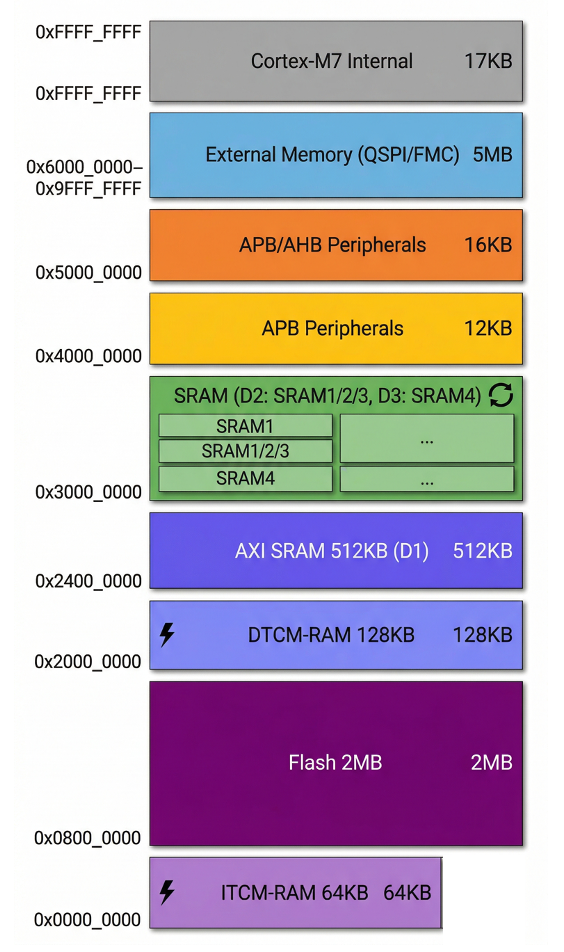 STM32H743 메모리 맵 — 주소별 영역 구분
STM32H743 메모리 맵 — 주소별 영역 구분
로봇 보드에서의 메모리 활용 전략:
- DTCM (128KB): 제어 루프 변수, PID 파라미터, 모터 명령 버퍼 → 가장 빠른 접근
- AXI SRAM (512KB): ExoData 구조체, 센서 데이터 배열, 설정 파일 파싱 버퍼
- SRAM1/2 (256KB): DMA 전송 버퍼 (ADC, UART, SPI) → D2 도메인의 DMA가 직접 접근
- SRAM4 (64KB): 저전력 모드에서도 유지해야 할 데이터
1.4 버스 아키텍처
STM32H7의 버스는 3개의 전원 도메인(D1, D2, D3)으로 나뉜다:
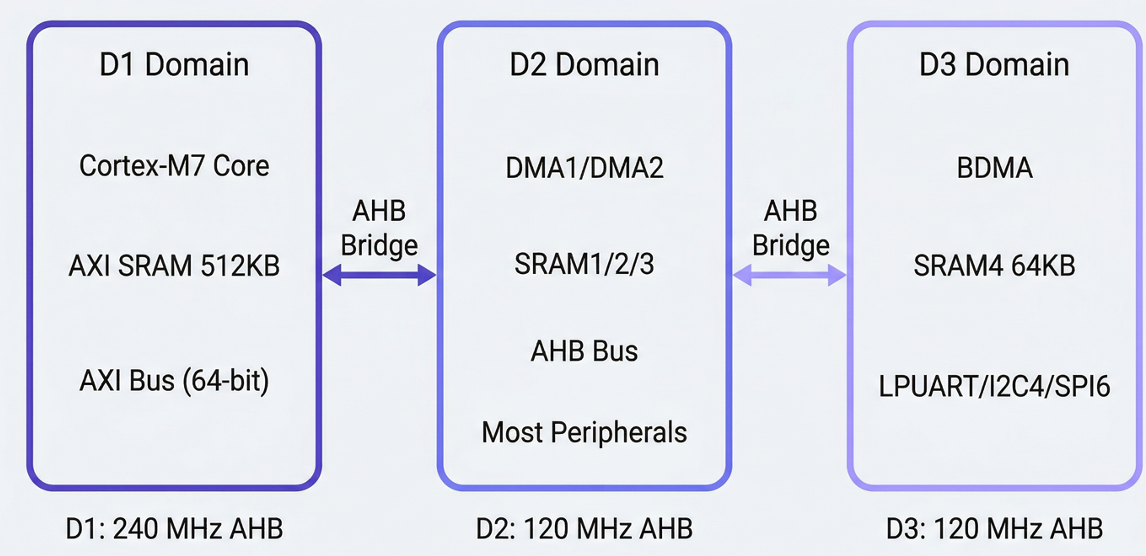 D1/D2/D3 전원 도메인과 버스 아키텍처
D1/D2/D3 전원 도메인과 버스 아키텍처
핵심 포인트:
- GPIO는 AHB4 (D3 도메인)에 연결되어 있어 모든 도메인에서 접근 가능
- FDCAN1/2는 APB1 (D2 도메인)에 있으므로 DMA1/2와 함께 사용 시 SRAM1/2에 버퍼 배치
- ADC1/2는 APB2에, ADC3는 AHB4에 있어 서로 다른 도메인 → DMA 버퍼 위치 주의

Henry — 로봇 교육 창시자
모두를 위한 로봇 교육을 꿈꾸는 엔지니어입니다. 하드웨어 브링업부터 AI 지능형 로봇까지, 실제 학습 과정을 기록하고 공유합니다.
기술 여정 함께하기
Comments
Loading comments...